
Arduino и сервопривод
Описание
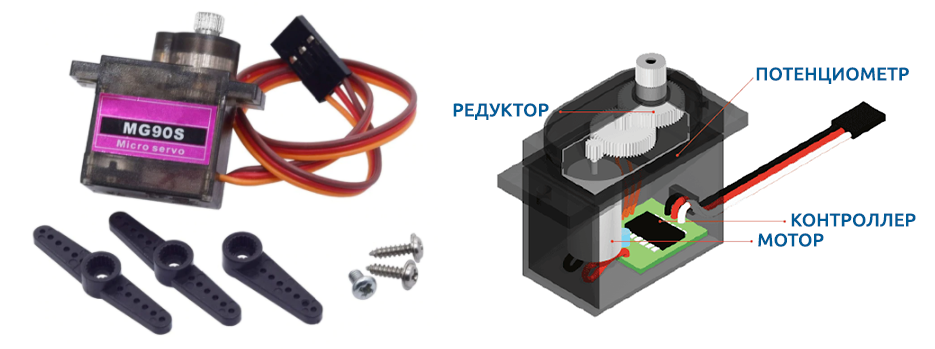
Сервопривод, он же сервомашинка, он же просто серво – простейший “модельный” актуатор, использовался в радиоуправляемых моделях ещё до появления Ардуино. Сервопривод поворачивает свой выходной вал в диапазоне ~180 градусов и обладает вполне приличным моментом для перемещения частей механизмов. В маленьком корпусе располагаются:
- Коллекторный моторчик
- Редуктор (пластиковый или металлический)
- Потенциометр обратной связи
- Контроллер (драйвер мотора, обратная связь, управление по интерфейсу PWM)
Серво комплектуется набором “качалок” и винтами для крепления
 Характеристики 9-граммового сервопривода:
Характеристики 9-граммового сервопривода:
- Напряжение питания: 3.. 7.2V
- Крутящий момент:
- 1.2кг/см при 4.8V
- 1.6кг/см при 6.0V
- Рабочий угол: 160.. 180 градусов
- Скорость (без нагрузки): 180 градусов за 0.3с
- Интерфейс: PWM
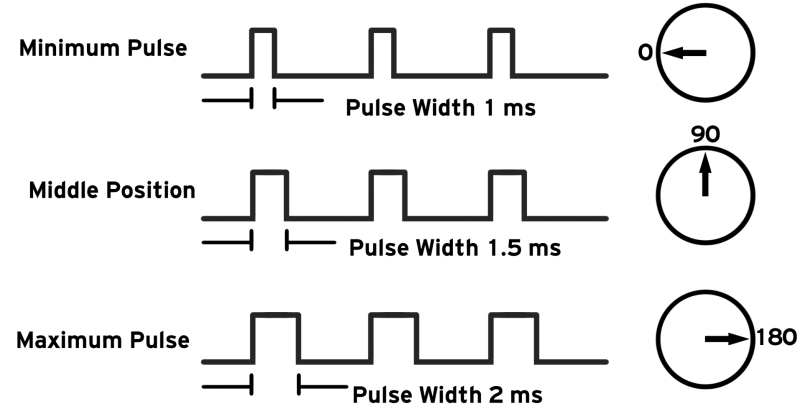
Сервопривод управляется ШИМ сигналом, точнее длиной импульса: минимальная (0 градусов) и максимальная (~180 градусов) длина импульса колеблется в зависимости от модели и производителя сервопривода.
Подключение
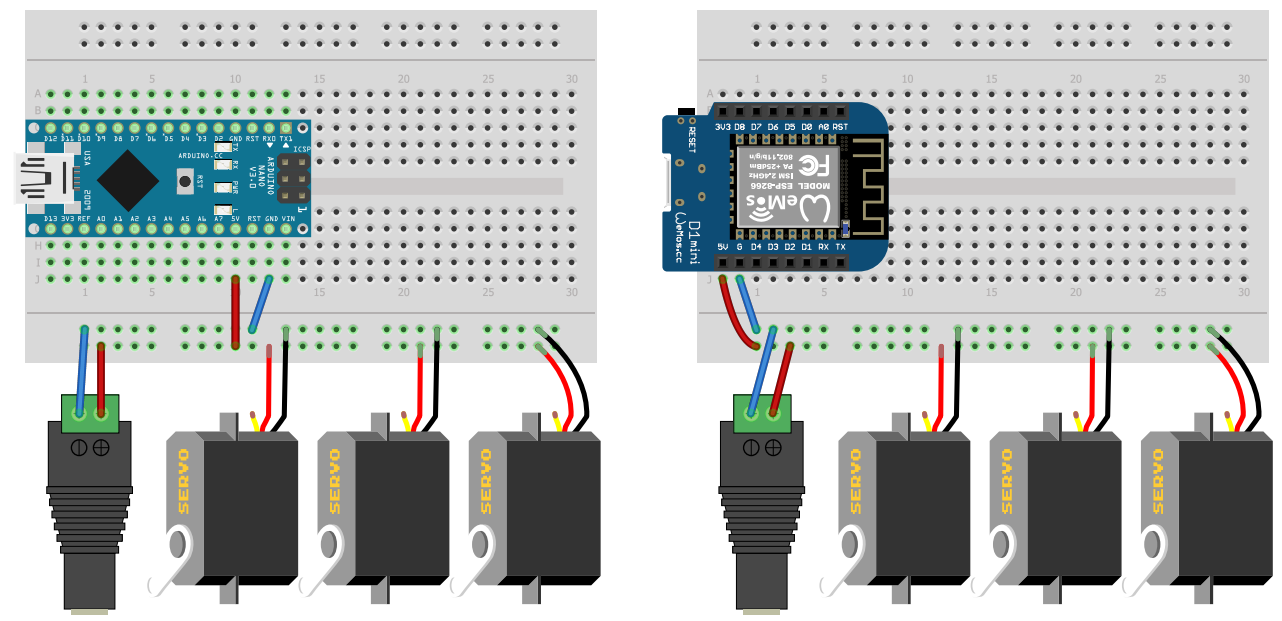
Провода:
- Коричневый: GND
- Красный: VCC
- Жёлтый: цифровой пин
Примечание: сервопривод потребляет довольно приличный ток (стартовый до 1А), поэтому рекомендуется питать его от внешнего источника. При питании от компьютера напряжение может просесть и МК перезагрузится, при высокой нагрузке (с 2 и больше приводов) может выгореть защитный диод на плате Arduino!

Библиотеки
Для управления сервоприводом можно использовать стандартную библиотеку Servo. Эта библиотека отбирает у микроконтроллера первый таймер, поэтому в некоторых случаях будет удобно использовать библиотеку SoftServo. Стандартная библиотека управляет сервоприводом очень резко, на максимальной скорости, поэтому для реальных применений лучше использовать библиотеку плавного движения серво – ServoSmooth.
Servo.h
Библиотека стандартная и идёт в комплекте с Arduino IDE. Подключаем и создаём объект сервопривода. При создании никакие аргументы не передаются:
#include <Servo.h> Servo myservo;
Библиотека имеет следующие методы:
uint8_t attach(int pin); // "подключить" с указанием пина uint8_t attach(int pin, int min, int max); // "подключить" с указанием пина и мин. макс. сигнала void detach(); // отключить void write(int value); // повернуть на угол в градусах void writeMicroseconds(int value); // повернуть на длину импульса
При “подключении” серво через attach(pin) диапазон длины импульса устанавливается стандартный: 544.. 2400 мкс (задан в библиотеке). Если есть желание настроить серво идеально, чтобы она работала на весь диапазон – нужно попробовать покрутить её через writeMicroseconds() в крайних значениях диапазона и найти минимум и максимум, при которых серво “упирается”.
Примеры
Домашнее задание
- Попробовать библиотеку ServoSmooth