
Мотор с редуктором
Описание
В комплектацию GyverKIT PRO входят два мотора постоянного тока со встроенным червячным редуктором:

Характеристики:
- Питание: 3.. 6V
- Ток: 100.. 300 мА (холостой и под нагрузкой)
- Обороты (холостые): 125 об/мин
- Момент: 5.5 кг*см (при 6V)
Мотор достаточно мощный, заблокировать вал пальцами практически невозможно. Можно использовать в качестве привода робота-машинки (колёса и платформа есть в комплекте начиная с партии 003), а также отдельно: для управления рулонными шторами и прочими механизмами.
Подключение
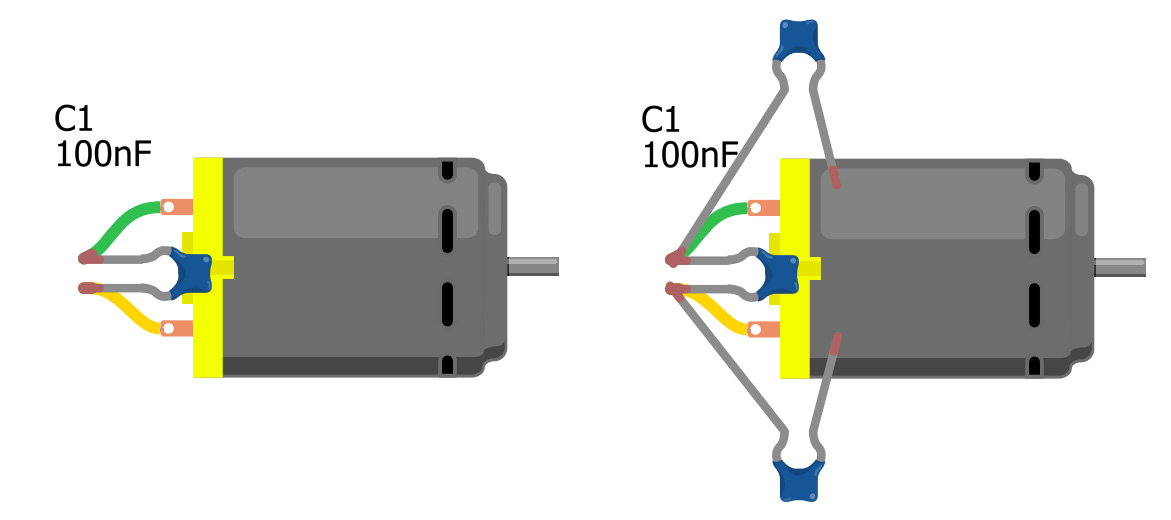
Для гашения искр от щёток, которые создают сильные помехи на остальную электронику в схеме, желательно припаять на выводы мотора керамический конденсатор 0.1 мкФ (есть в наборе) – картинка слева. Для максимальной защиты рекомендуется припаять конденсаторы от каждого вывода на корпус мотора (для лужения корпуса может понадобиться паяльная кислота) – картинка справа.
Через драйвер
Для включения мотора в обе стороны, а также управления скоростью вращения, в наборе есть драйвер. Он подробно описан в отдельном уроке.
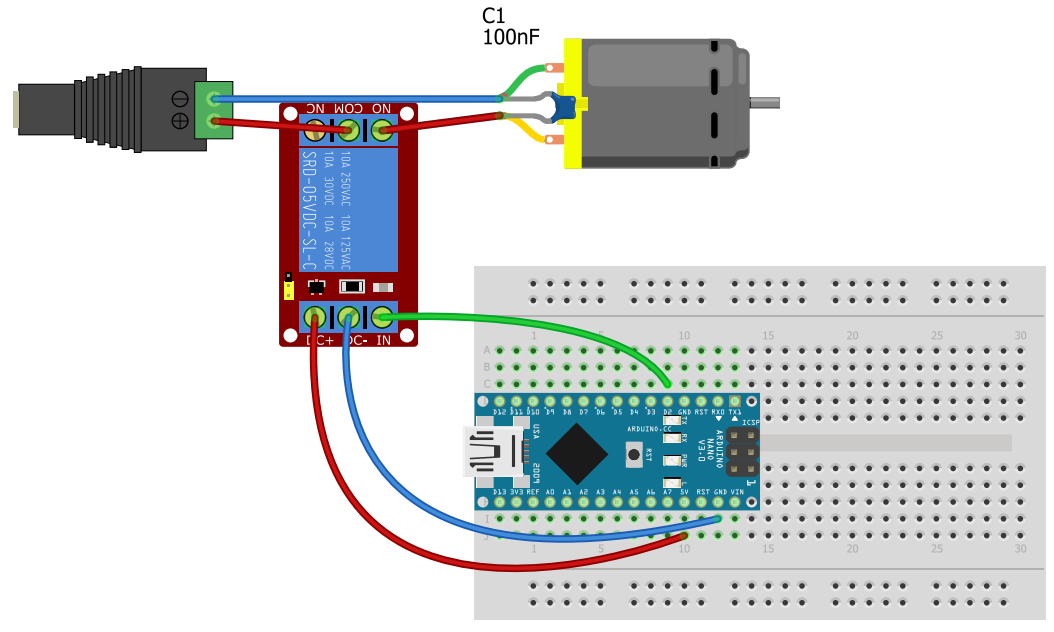
Через реле
Можно управлять мотором релейно (вкл/выкл) при помощи реле (отдельный урок про реле), подключив его в разрыв питания:
Для включения/выключения просто подать HIGH или LOW сигнал на пин:
#define MOT_PIN 2 // вынесли константой для удобства
void setup() {
pinMode(MOT_PIN, OUTPUT); // пин как выход
}
void loop() {
// включаем и выключаем каждую секунду
digitalWrite(MOT_PIN, HIGH);
delay(1000);
digitalWrite(MOT_PIN, LOW);
delay(1000);
}
Через MOSFET
Для плавного управления скоростью в одном направлении можно использовать MOSFET транзистор (урок про транзистор) или MOSFET модуль (урок про MOSFET модуль). Мотор является индуктивной нагрузкой, поэтому обязательно должен быть зашунтирован диодом (есть в наборе) во избежание повреждения транзистора!
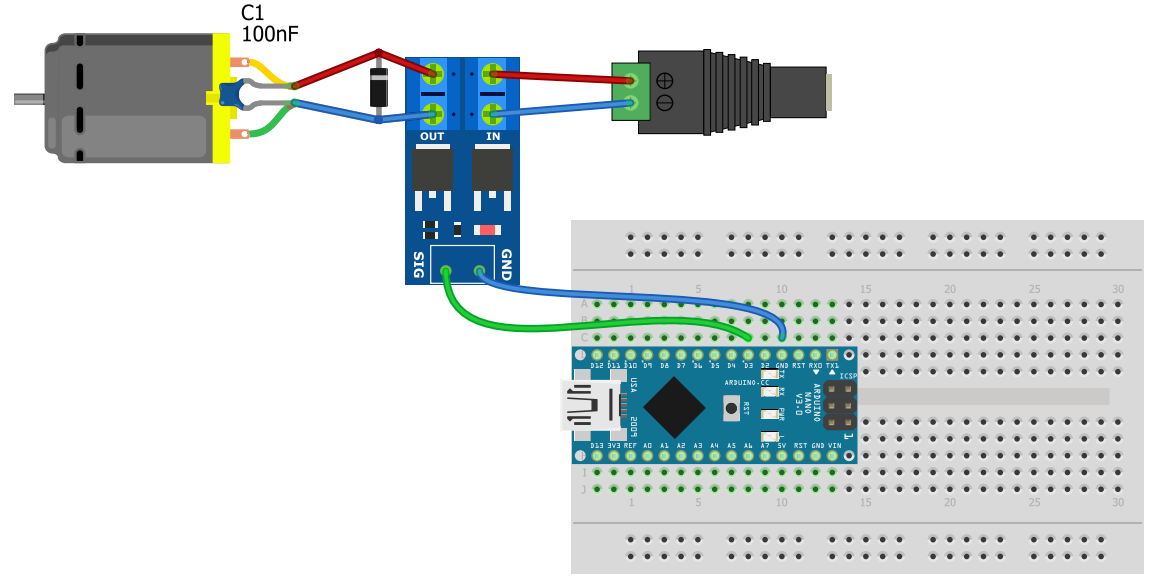
Управлять скоростью можно при помощи ШИМ сигнала, точно так же, как в уроке про светодиод. Именно поэтому мотор подключен на пин D3.
#define MOT_PIN 3
void setup() {
pinMode(MOT_PIN , OUTPUT);
}
void loop() {
analogWrite(MOT_PIN , 128); // включить на 50%
delay(2000);
analogWrite(MOT_PIN , 255); // включить на 100%
delay(2000);
}
И пример с “плавным миганием”:
#define MOT_PIN 3
void setup() {
pinMode(MOT_PIN, OUTPUT);
}
uint32_t tmr; // переменная таймера
int val = 0; // переменная яркости
int dir = 2; // скорость и направление яркости
void loop() {
// асинхронный таймер на миллис
if (millis() - tmr >= 20) {
tmr = millis();
val += dir; // прибавляем скорость
if (val >= 255 || val <= 0) dir = -dir; // разворачиваем
analogWrite(MOT_PIN, val); // применяем
}
}
Мотор будет плавно набирать скорость до максимума, а затем плавно сбавлять её до нуля. Расширенное управление мотором при помощи библиотеки GyverMotor мы разбирали в уроке про драйвер.
Домашнее задание
- Попробовать все способы управления мотором
- Прочитать урок по моторам, попробовать схему с двумя реле