
RC машинка. Мотор и сервопривод
Задача
- Перевести магазинную радиоуправляемую машинку на управление с Arduino по радио 433 МГц
- Руль — сервомашинка
- Привод колёс — коллекторный мотор
- В рамках данного примера брать сигнал управления с руля и педалей для компьютера
- Потенциометр — руль
- Потенциометр — газ
- Потенциометр — тормоз (задний ход)
Базовые уроки
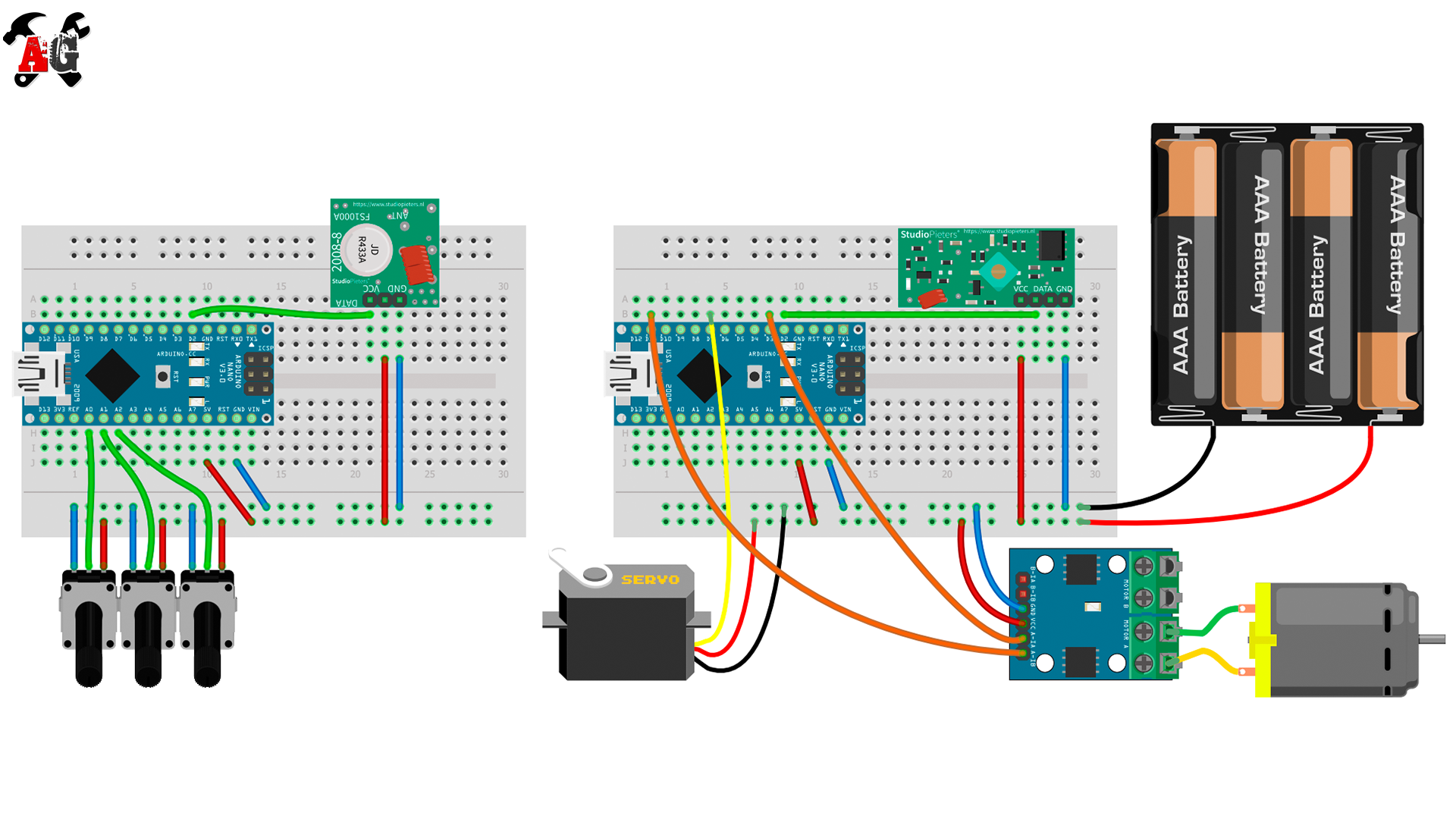
Подключение
Базовая схема передатчика и приёмника:
Библиотеки
- Gyver433 — библиотека для радиомодулей
- Servo — встроенная библиотека для управления сервоприводом
Программа
Логика работы следующая: передатчик измеряет показания потенциометров, преобразует в нужный диапазон для управления и отправляет по радио 10 раз в секунду. Приёмник принимает и раздаёт сигналы на мотор и сервопривод.
Библиотека Gyver433 позволяет передавать любые данные, поэтому для удобства и наглядности сделаем структуру. Для скорости используем int, значения в нашем случае не будут превышать -255.. 255. Для поворота руля серво хватит byte, так как диапазон поворота серво составляет 0.. 180 градусов. Структура выглядит так:
// формат пакета для отправки
struct Data {
int16_t speed; // -255.. 255
uint8_t steer; // 0..180
};
Передатчик
Зададим константами пины подключения, для удобства дальнейшей работы:
#define RADIO_PIN 2 // пин радио #define THROT_PIN A0 // газ #define BRAKE_PIN A1 // тормоз #define STEER_PIN A2 // руль
Далее нам нужны пределы сигналов с потенциометров руля, газа и заднего хода, чтобы масштабировать этот диапазон для отправки:
// пределы сигналов с датчиков #define STEER_MIN 1023 // руль #define STEER_MAX 0 #define THROT_MIN 330 // газ #define THROT_MAX 0 #define BRAKE_MIN 190 // тормоз #define BRAKE_MAX 1023
Эти значения нужно будет измерить и исправить для своего железа.
У сервы и мотора тоже есть пределы, предлагаю ввести их на стороне передатчика, чтобы для настройки прошивать только его и не разбирать машинку:
// пределы поворота серво #define SERVO_MIN (90-40) #define SERVO_MAX (90+40) // пределы газа и тормоза #define MOTOR_MAX 250 #define MOTOR_MIN 100
Данные значения опять же настраиваются под своё железо и предпочтения.
Затем подключаем библиотеку и настраиваем радио. Я буду использовать FAST режим и скорость 3000, «зелёные» радиомодули отлично работают в таком режиме.
#define G433_SPEED 3000 #define G433_FAST #include <Gyver433.h> Gyver433_TX<RADIO_PIN> tx; // указали пин
В блоке setup() запустим Serial для вывода сигналов с потенциометров. После настройки Serial можно будет отключить (закомментировать строку):
void setup() {
Serial.begin(9600);
}
В блоке loop() последовательно выполняем следующие действия:
Читаем аналоговый сигнал со всех трёх элементов управления:
// читаем сигналы с управления int steer = analogRead(STEER_PIN); int throt = analogRead(THROT_PIN); int brake = analogRead(BRAKE_PIN);
Выводим сырые значения в порт, чтобы настроить по ним диапазоны. После настройки вывод можно убрать:
// для отладки
Serial.print(steer);
Serial.print(',');
Serial.print(throt);
Serial.print(',');
Serial.println(brake);
Далее приводим эти значения к указанным диапазонам для серво и мотора, и на всякий случай ограничиваем:
// приводим steer = map(steer, STEER_MIN, STEER_MAX, SERVO_MIN, SERVO_MAX); throt = map(throt, THROT_MIN, THROT_MAX, 0, MOTOR_MAX); brake = map(brake, BRAKE_MIN, BRAKE_MAX, 0, MOTOR_MIN); // ограничиваем steer = constrain(steer, SERVO_MIN, SERVO_MAX); throt = constrain(throt, 0, MOTOR_MAX); brake = constrain(brake, 0, MOTOR_MIN);
Осталось создать экземпляр структуры, заполнить его данными и отправить по радио. С педалями газ-тормоз поступим следующим образом: вычтем сигнал тормоза (заднего хода) из сигнала «газа». Это позволит допускать одновременное нажатие педалей, и работать оно будет вполне реалистично: дали газу, чуть поджали тормоз — машинка стала ехать медленнее =)
// готовим к отправке Data data; data.steer = steer; // газ минус тормоз // Допускает одновременное нажатие data.speed = throt - brake; // отправляем tx.sendData(data);
Слишком часто отправлять нет смысла, поэтому введём задержку на 10 мс (отправка 100 раз в секунду). Если вы будете модифицировать данный проект и задержка будет мешать — отправку всегда можно сделать по таймеру на millis() (см. уроки).
// 100 раз в секунду delay(10);
Приёмник
В приёмной части тоже задаём пины:
#define RADIO_PIN 2 // пин радио #define SERVO_PIN 5 // пин серво #define MOTOR_A 3 // пин мотора #define MOTOR_B 11 // пин мотора
Также я ввёл такую настройку, как минимальная скорость мотора. Например мы знаем, что машинка начинает ехать при значении сигнала ШИМ больше 45. В дальнейшей программе диапазон управления будет отмасштабирован таким образом, чтобы при небольшом «нажатии на педаль» значение ШИМ росло с 45 (или другого значения):
// мин. скорость мотора (0-255) // для большей резкости управления #define MIN_DUTY 45
Далее подключаем библиотеку радио и настраиваем на такую же скорость, как у приёмника. Также у приёмника есть буфер, мы будем передавать 3 байта данных (int + byte), размер буфера ставим 3:
#define G433_SPEED 3000 #include <Gyver433.h> Gyver433_RX<RADIO_PIN, 3> rx; // размер буфера 3 байта
Подключаем библиотеку серво и создаём себе одну серву:
#include <Servo.h> Servo servo;
Для мотора я написал отдельный класс, который использует два ШИМ пина для равномерного управления. Он просто размещается в программе:
По сути, это мини библиотека. Создаём себе мотор с указанием пинов и минимального сигнала ШИМ:
Motor motor(MOTOR_A, MOTOR_B, MIN_DUTY);
В блоке setup() включаем Serial (если нужен для отладки, в рабочем проекте можно выключить), подключаем серво и разгоняем частоту ШИМ как в этом уроке:
void setup() {
Serial.begin(9600);
// подрубаем серво
servo.attach(SERVO_PIN);
servo.write(90);
// разгоняем ШИМ чтобы не гудело
// Пины D3 и D11 - 8 кГц
TCCR2B = 0b00000010; // x8
TCCR2A = 0b00000011; // fast pwm
}
В блоке loop() нам нужно опрашивать радио и раздавать сигналы управления на «железо». Но начнём мы с другого: представьте, что вы ехали на полном газу, и тут вдруг пропал сигнал с радио. Машинка продолжит движение с той же скоростью. Чтобы обезопасить себя от этого, введём таймаут: если сигнала с радио не было дольше определённого количества времени — останавливаем мотор. На RC сленге это называется failsafe:
// таймаут приёма данных
static uint32_t tmr;
// если сигнала с радио нет 200 мс
// выключаем мотор
if (millis() - tmr > 200) {
motor.run(0);
tmr = millis();
}
Далее нужно принять сигнал с радио (подробнее см. пример в библиотеке Gyver433). Если данные успешно приняты — сбрасываем таймаут и раздаём сигналы управления:
// приём по радио
if (rx.tick()) {
Data data;
// если чтение без ошибок
if (rx.readData(data)) {
tmr = millis(); // сброс таймаута
servo.write(data.steer);
motor.run(data.speed);
/*
// для отладки
Serial.print(data.steer);
Serial.print(',');
Serial.println(data.speed);
*/
}
}
Также можно вывести отладочную информацию в порт, проверить, работает ли радио. В рабочей программе отладку можно закомментировать.
Полный код программы
Возможные доработки
Можно оставить только одну «педаль» — газ. В среднем положении потенциометра — стоп, вперёд и назад — соответственно вперёд и назад. Сделать это очень просто: убираем из кода всё что связано с педалью brake, а педаль газа масштабируем как
throt = map(throt, THROT_MIN, THROT_MAX, -MOTOR_MIN, MOTOR_MAX); throt = constrain(throt, -MOTOR_MIN, MOTOR_MAX);
И отправляем по радио как
data.speed = throt;
И всё!