
Arduino и акселерометр MPU6050
Описание
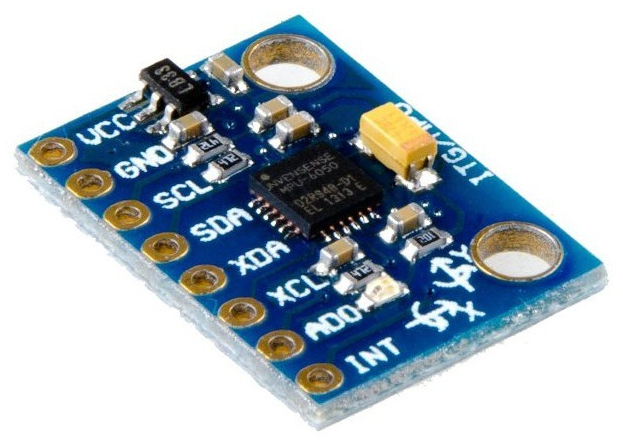
MPU6050 – трёх осевой осевой датчик ускорения (акселерометр) и угловой скорости (гироскоп). Используется для получения информации о положении в пространстве, движении, также может быть использован как датчик вибрации и удара. Микросхема гораздо умнее, чем кажется на первый взгляд: там есть встроенный процессор, который можно программировать, но железка реально сложная. Продаётся в виде удобного модуля:
Характеристики датчика:
- Питание: 2.3.. 3.5V
- Диапазон ускорений: от ±2g до ±16g
- Диапазон угловых скоростей: от ±250 град/с до ±2000 град/с
- Интерфейс: I2C
На модуле выведены:
- VCC и GND: питание 3.. 5V (на модуле стоит стабилизатор)
- SDA и SCL: вывод шины I2C для связи с МК
- XDA и XCL: позволяют подключать к модулю другие датчики (например, магнитометр)
- AD0: выбор адреса. Никуда не подключен:
0x68, подтянут к VCC –0x69 - INT: пин прерывания готовности (поведение настраивается в программе)
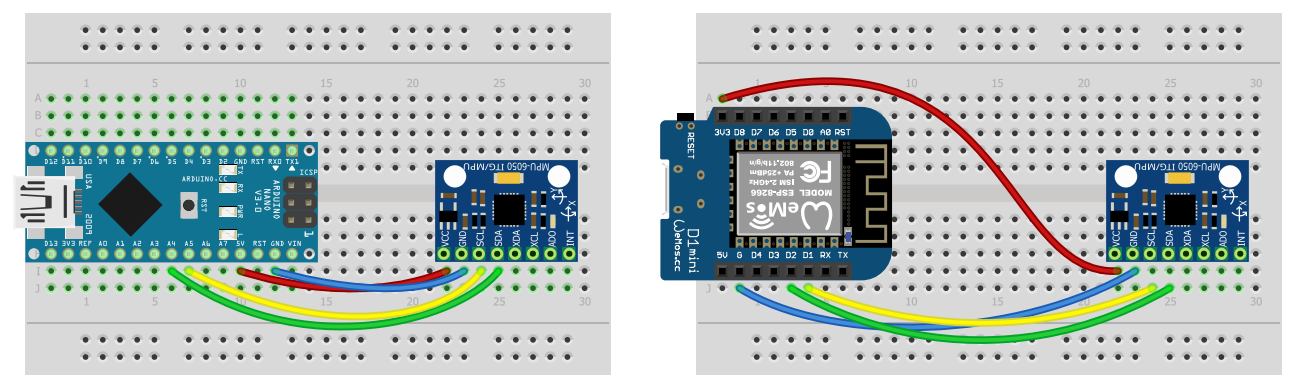
Подключение
Дисплей подключается по шине I2C, выведенной на пины:
- Arduino: SDA – A4, SCL – A5
- Wemos: SDA – D2, SCL – D1
Библиотеки
С модулем можно работать напрямую, а можно при помощи библиотеки от i2cdev. Нужные компоненты от i2cdev идут в архиве к набору, также их можно скачать с github разработчика: качаем весь архив, из него достаём Arduino/I2Cdev и Arduino/MPU6050, кладём себе в папку с библиотеками.
Примеры
Очень много полезной информации и примеров по данному датчику есть в статье на моём основном сайте!
Домашнее задание
- Изучить статью по MPU6050 у меня на сайте