
Драйвер моторов L9110S
Описание
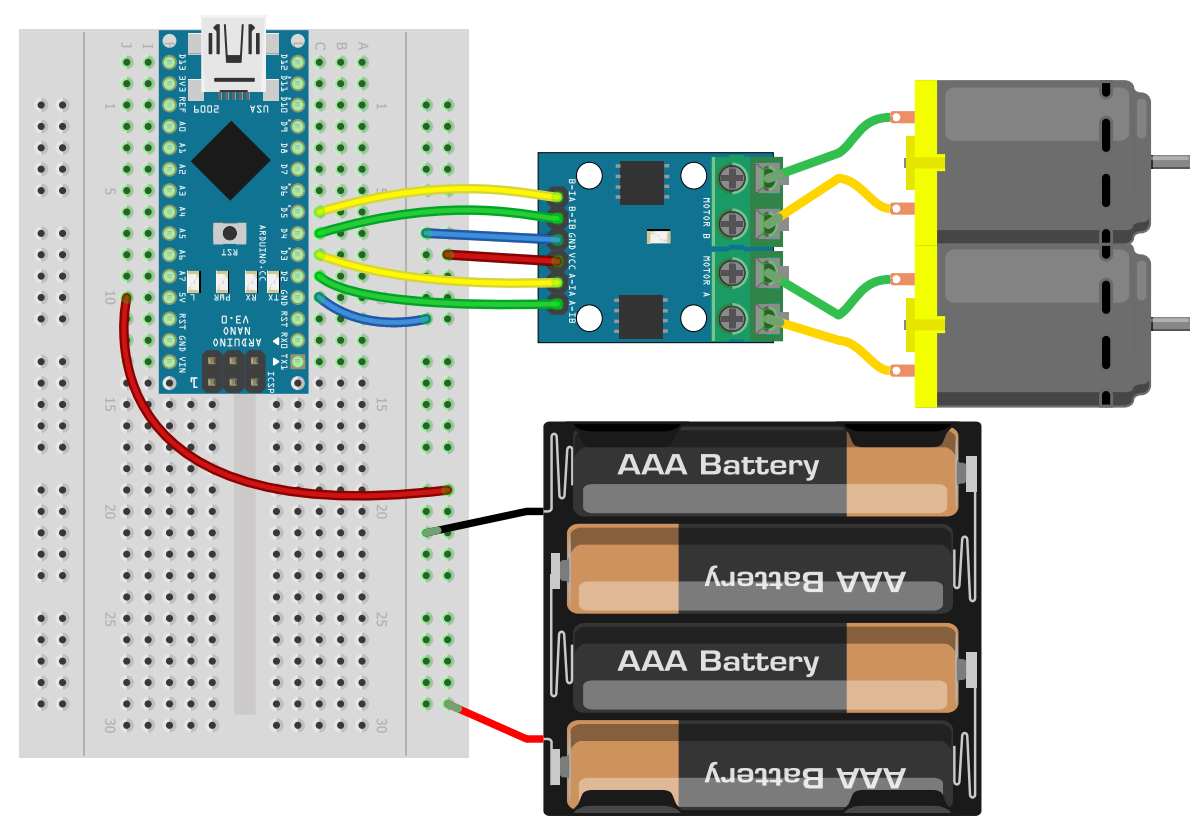
В комплекте GyverKIT Pro идёт драйвер для двух коллекторных моторов L9110S:

Драйвер работает по классической схеме Н-мост, по два пина управления на каждый мотор. Это позволяет подключать к нему как обычные коллекторные моторы (есть в наборе), так и двухфазные шаговые моторы, а также обычные RGB светодиодные ленты (как в этом проекте). Характеристики:
- Напряжение логики: 3.. 5V
- Напряжение мотора: 2.5.. 12V
- Рабочий ток: 800 мА
- Пиковый ток: 1.5А
Подключение
- Для управления выходами достаточно подключить микроконтроллер к GND и управляющим пинам драйвера
- VCC на плате драйвера идёт на питание мотора, то есть его к микроконтроллеру подключать не нужно (за исключением тех случаев, когда МК и драйвер питаются от одного источника)
- Управляющие пины драйвера подключаются к любым цифровым пинам МК. Если нужно управление скоростью вращения мотора – один из пары пинов нужно подключать на пин МК с возможностью ШИМ сигнала
- В данном модуле пины управления подтянуты к VCC резисторами на 10 кОм, то есть при управлении 12V нагрузкой они окажутся под высоким напряжением. Пины МК защищены от повышенного напряжения, но всё равно не рекомендуется управлять нагрузкой с напряжением выше питания МК. В наборе GyverKIT идут моторы, которые работают от 5V, а также сетевой адаптер (блок питания) на 5V

Библиотеки
Управлять драйвером с мотором можно и без библиотеки, про это у меня есть отдельный текстовый урок, и видео урок:
Но с библиотекой это делать гораздо удобнее, например универсальная GyverMotor, к ней есть отдельная документация. И видео урок:
Примеры
#include "GyverMotor.h"
// (тип драйвера, пин, ШИМ пин, уровень драйвера)
GMotor motor1(DRIVER2WIRE, 2, 3, HIGH);
GMotor motor2(DRIVER2WIRE, 4, 5, HIGH);
void setup() {
motor1.setMode(FORWARD); // мотор 1 вперёд
motor2.setMode(BACKWARD); // мотор 2 назад
motor1.setSpeed(50); // скорость мотора 1
motor2.setSpeed(150); // скорость мотора 2
}
void loop() {
}